
type
status
date
slug
summary
tags
category
icon
password
基本符号标准
向量 | 粗体小写字母 | |
矩阵 | 粗体大写字母 | |
坐标系 | 花体字母 | |
坐标系的原点 | 斜体大写字母 | |
坐标系的单位基向量 | ㅤ | |
点P相对于惯性坐标系的绝对速度 | ㅤ | |
点P相对于惯性坐标系的加速度 | ㅤ | |
坐标系相对于坐标系的角速度 | ㅤ | |
坐标系的绝对角速度 | ㅤ | |
坐标系的绝对角加速度 | ㅤ |
SE(3)表示特殊欧几里得群(Special, Euclidean Group),他包括所有的三维欧几里得变换,包括平移和旋转,一个SE(3)变换可以由一个3×4的矩阵表示,前三列是旋转矩阵,,第四列是平移向量。SE(3)变换可以用于描述机器人在三维空间中的位姿。
SO(3)表示特殊正交群(Special Orthogonal Group),它包含了所有三维旋转矩阵,一个SO(3)可以由一个3×3的矩阵表示,他满足正交性和行列式为1的限制条件。SO(3)可以用于描述物体在三维空间中的旋转。
QR分解
QR分解(QR decomposition)是一种矩阵分解方法,它将一个矩阵分解为一个正交矩阵Q和一个上三角矩阵R的乘积。
具体地,对于一个m×n(m≥n)的矩阵A,QR分解可以写成
Q是一个m×m的正交矩阵,即Q的转置矩阵等于它的逆矩阵,满足
R是一个m×n的上三角矩阵,即R的主对角线以下的元素均为零。
QR分解有很多应用,例如线性回归、最小二乘法、PCA等。在这些应用中,QR分解可以用于求解一些矩阵的特征值和特征向量,而这些特征值和特征向量在数学和工程领域中都有广泛的应用。QR分解有多种算法实现,包括Gram-Schmidt正交化、Householder变换和Givens旋转等方法。其中,Householder变换和Givens旋转方法通常被认为是比较稳定和高效的QR分解算法。
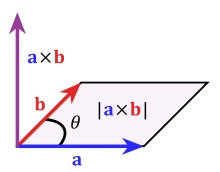
向量的点乘与叉乘
假设,
向量的点乘及其意义和性质
点乘的几何意义是用来表征或计算两个向量之间的夹角,以及在方向上的投影
向量点乘的性质
MATLAB 中点乘函数为dot()
- Author:Lianzhao
- URL:https://lianzhao.vercel.app//article/BasicConceptsSymbols
- Copyright:All articles in this blog, except for special statements, adopt BY-NC-SA agreement. Please indicate the source!
Relate Posts